The release of ROS 2 Dashing Diademata, the first ROS 2 distribution with long term support (LTS), is an indicative of the platform's maturity and readiness to become a standard in the robotics industry. Find the release page here.
According to the May 2019 ROS Usage Survey, 52% of ROS users are waiting for the release of ROS 2 Dashing Diademata in order to migrate from ROS 1 to ROS 2 in the latest community survey. Additional 20% of respondents said they'd just migrate within the next six months.
As one of the core contributors to the ROS ecosystem and an early adopter of ROS 2 with its MARA robotic arm and the rest of the products in its portfolio, Acutronic Robotics is excited at the prospects opened by this announcement. All of Acutronic Robotics products are already working over the ROS 2 Dashing Diademata distribution.
"ROS 2 Dashing Diademata brings stability and support over the long term to the ROS ecosystem. We have ported MoveIt! to ROS 2 in alignment with Dashing Diademata and in order to offer MARA (and the rest of our modular products) together with a native planning library offering stability to users. Ultimately we're sending a message to researchers and integrators who are thinking about making an investment to get on board the ROS 2 ecosystem, that they will have a stable platform to finalize their development over the course of at least two years", says Alejandro Hernández, the company's CTO .
As the result of an Open Source community, this release includes the work of many numerous persons and organizations, under the technical direction of the ROS 2 Technical Steering Committee (TSC). As one of the two organizations in the history of ROS -previously Willow Garage- overseeing and prioritizing the project Open Robotics, Open Robotics is a specially relevant member of this steering committee.
"This fourth ROS 2 distribution adds improvements along many dimensions, including components, intra-process communication, quality-of-service levels, and MoveIt. Perhaps more importantly, with Dashing being our first long-term support (LTS) release of ROS 2, we are letting the community know that we believe the time is right to start considering a transition from ROS 1 to ROS 2", considers Brian Gerkey, CEO of Open Robotics.
On its part, as members of the TSC, Acutronic Robotics has been pushing very hard internally over the last few months to contribute to ROS 2 overall, and particularly towards Dashing release in four main areas:
- Security: We've participated actively in the Security WG meetings, contributed and published a threat model for MARA -an industrial robotic manipulator that runs ROS 2 natively-. This work elaborated in collaboration with Alias Robotics presents a blueprint that other robotic companies using ROS 2 on industrial robots will be able to use for their own assessments and hopefully, contribute back.
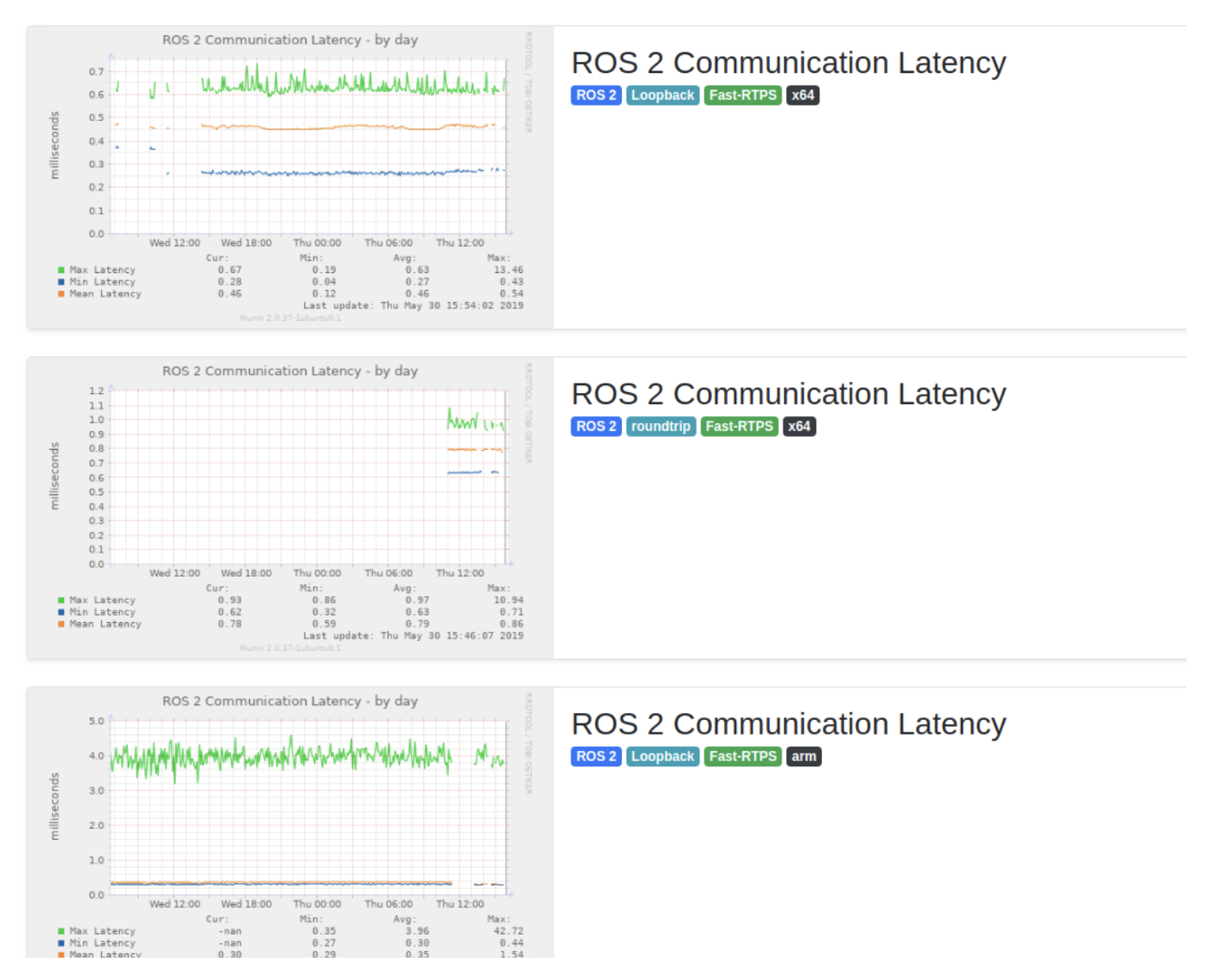
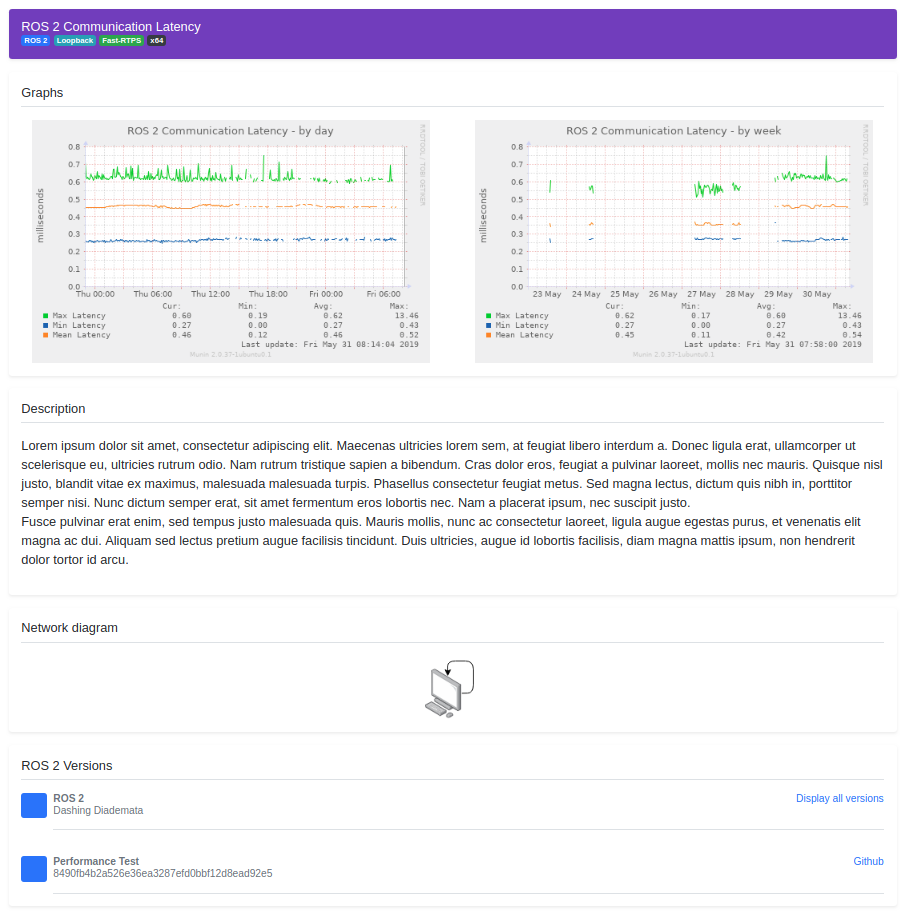
- Real-Time: Real-time is a pre-condition for safety. To us, robotics is a lot about system integration and for that, we need to have accurate information about the determinism of our hardware components (while powered by ROS 2), regardless of whether they do sensing or actuation. As part of our commitment with this topic we've been developing a ROS 2 Real-Time Quality Assurance (QA) Farm (inspired by https://www.osadl.org/QA-Farm-Realtime.qa-farm-about.0.html). We don't have a full release yet available but we can give you a sneak peak into how it'll look like:
roundtrip and loopback latency measurements for x86 and arm |
WIP layout for the different sections |
|---|---|
 |
 |
- Information models: Supported by the European Union (through the ROSin project), we've been advancing on how to enforce interoperability across ROS 2 native hardware by means of using Model-Driven Engineering approaches. The HRIM project (source code) generates ROS 2 communication artifacts directly from models which allows high flexibility and configuration for manufacturers. Stay tuned for an upcoming release!
- Manipulation and motion planning: As some of of you may know, we're the company pushing forward the first steps towards the MoveIt port to ROS 2 (our moveit2 fork). We recently announced the first demonstrator fulfilling our original goal: contribute and deliver to the community a first form of MoveIt 2. We're now delighted to announce MoveIt 2 alpha release. This work has been done while pushing our contributions upstream with the collaboration of PickNik and the MoveIt maintainers. Big thanks to them for their effort!