Testing and debugging robotic solutions can be a drag. Oftentimes, you are integrating a new component into your system, or working on a plugin, and need to repeatedly visualize what's coming out of it. Quite commonly, you just need a quick preview to make sure it's publishing what it should. rosshow caters perfectly to that need. When developing with ROS, this is a very handy tool indeed. So much so, that we've decided to contribute to its development by porting it to ROS2, with integrated HRIM support. Currently supported HRIM interfaces include:
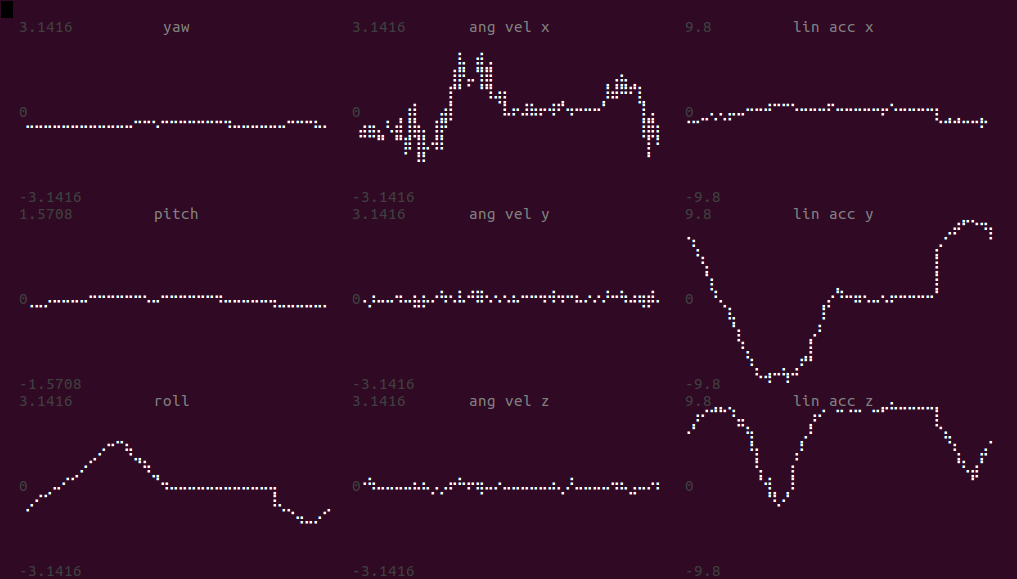
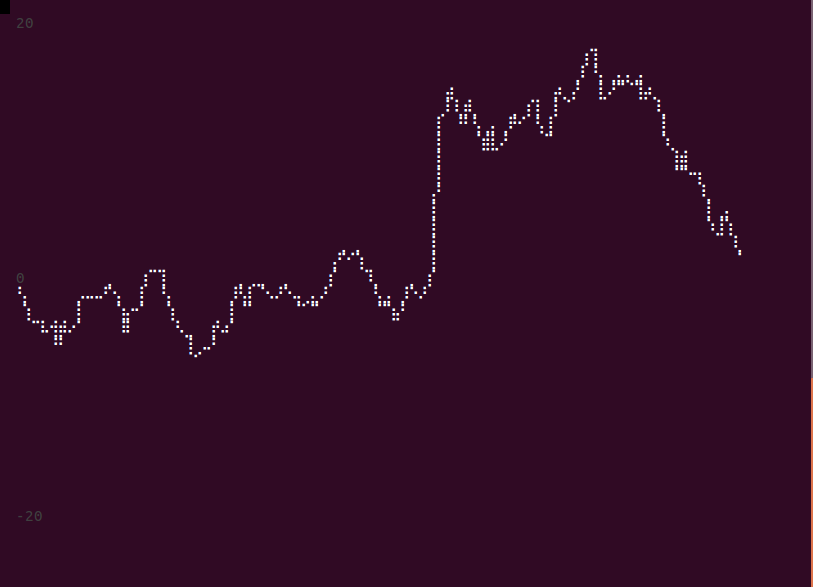
The usage of this tool is extremely simple; after compiling and sourcing it you just need to pass it to the topic you want to visualize. It will check if it supports the topics type and, if it does, provide a live visualization. simple as that. As an example, to visualize the PointCloud shown above, you'd just need to run:
rosshow2 /ray/pointcloud