Acutronic Robotics
robot modularity
There are hundreds of robotic companies making incompatible hardware. We solve this problem through H-ROS, a communication bus for robots.
1. The robot bus
A communication bus
designed for modular robots
3.
Universal robot language: ROS2
ROS2 is the de facto standard for
robot application development.
The universal robot API
4. A common ROS dialect
One dialect. Model-driven generated.
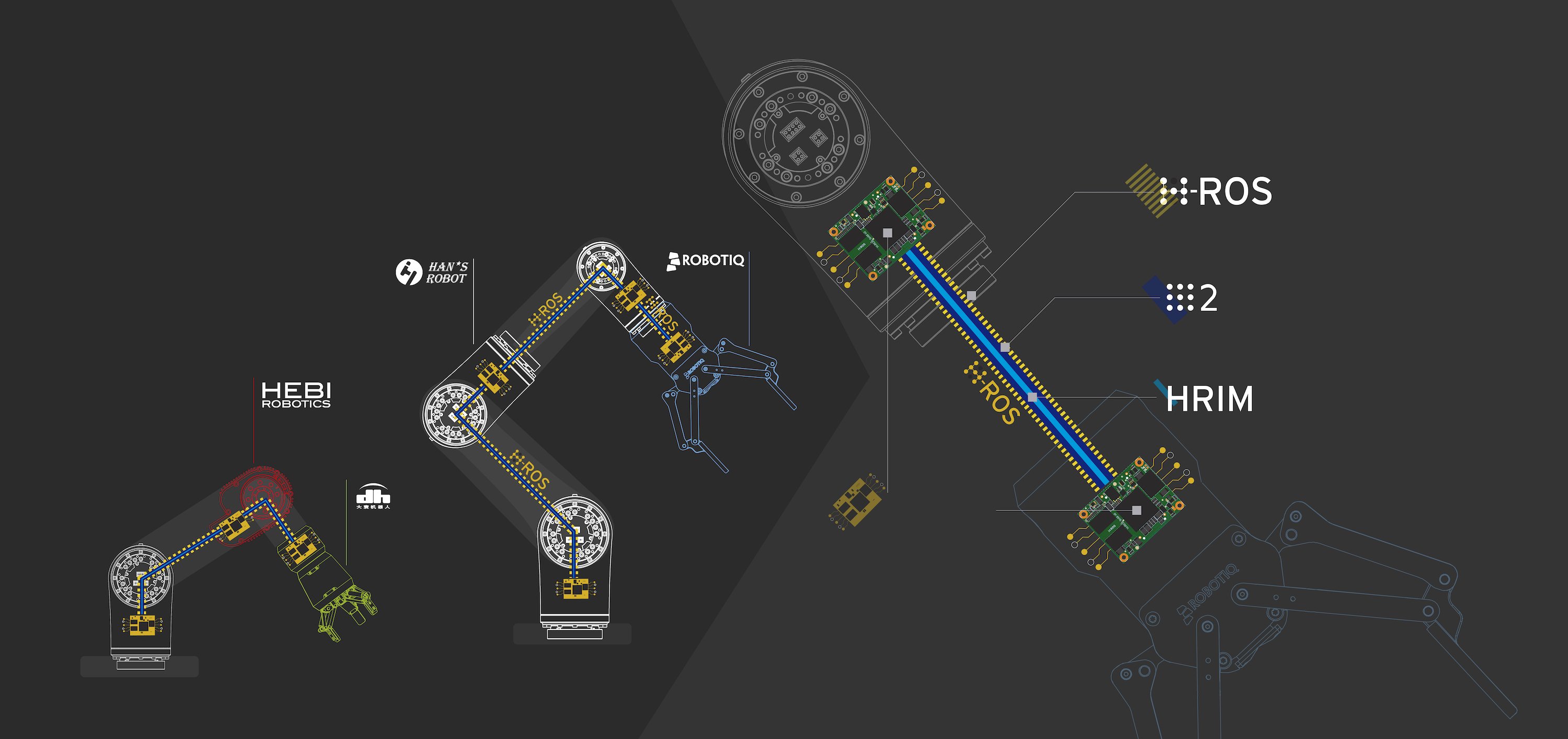
Interoperability across manufacturers
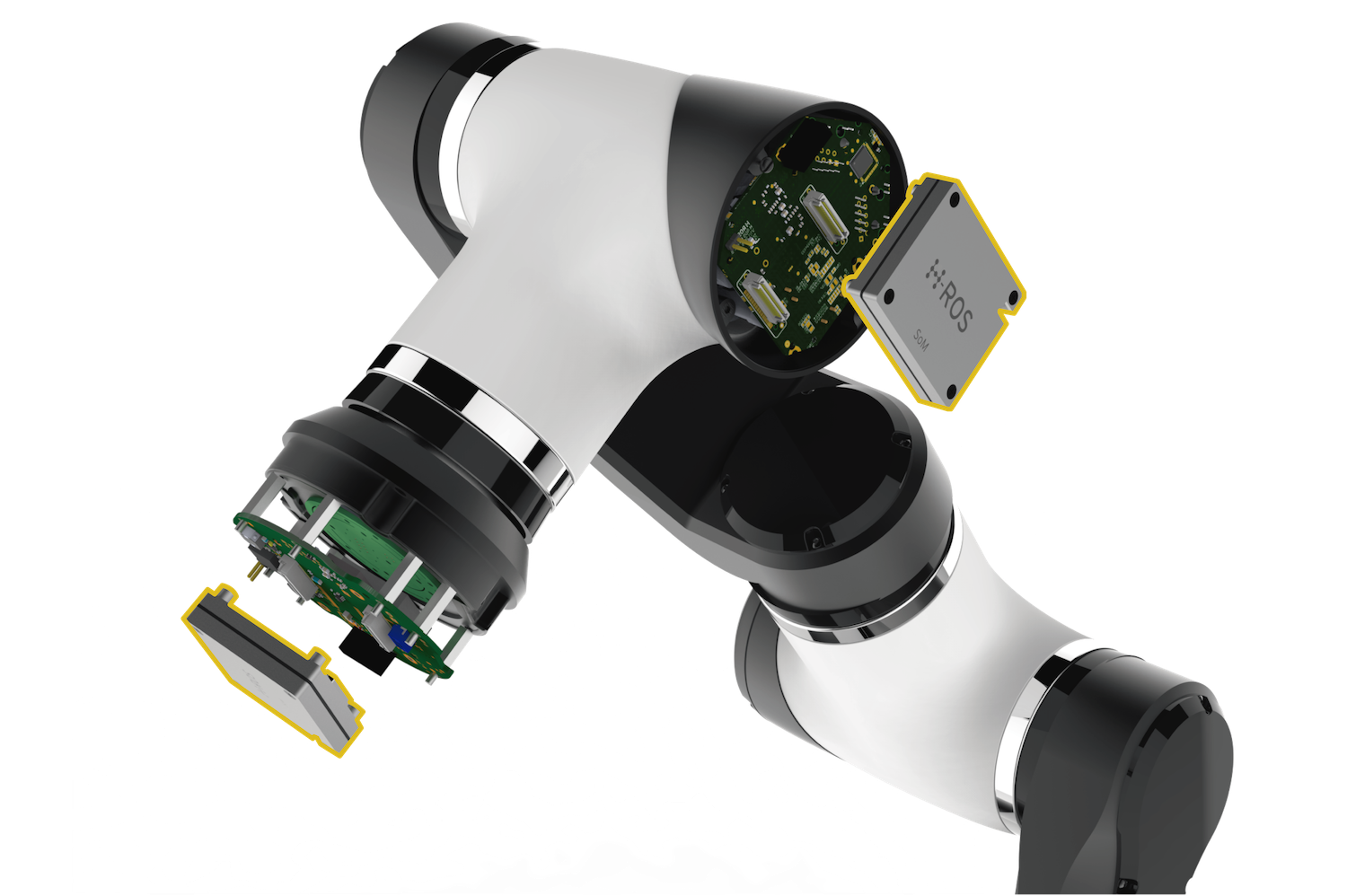
H-ROS SoM
2.
Vehicle for the H-ROS bus
A tiny device
that enables modularity
on each robot part
The robot bus
Thought for modularity. Real-time capable, secure and safe. Powered by ROS2.
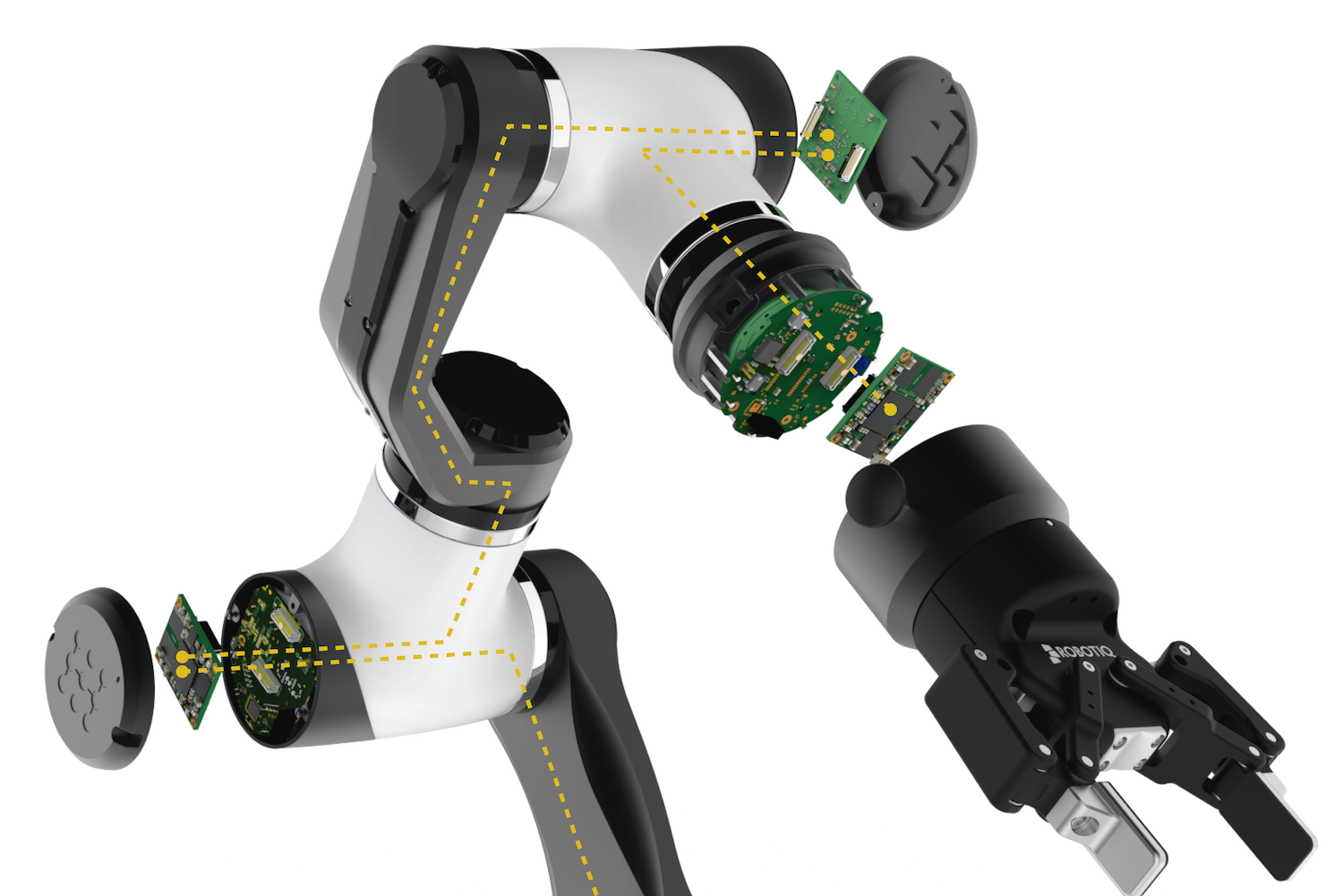

Adopt H-ROS robot bus easily
Add and configure the H-ROS SoM to obtain all benefits.
ROS2 native hardware
Make your hardware first class participant of the ROS ecosystem. Without intermediaries.
One interface, all robot modules
HRIM it simplifies interoperability and reconfigurability.
It allows to connect ROS systems with others, including OPC UA ones.