
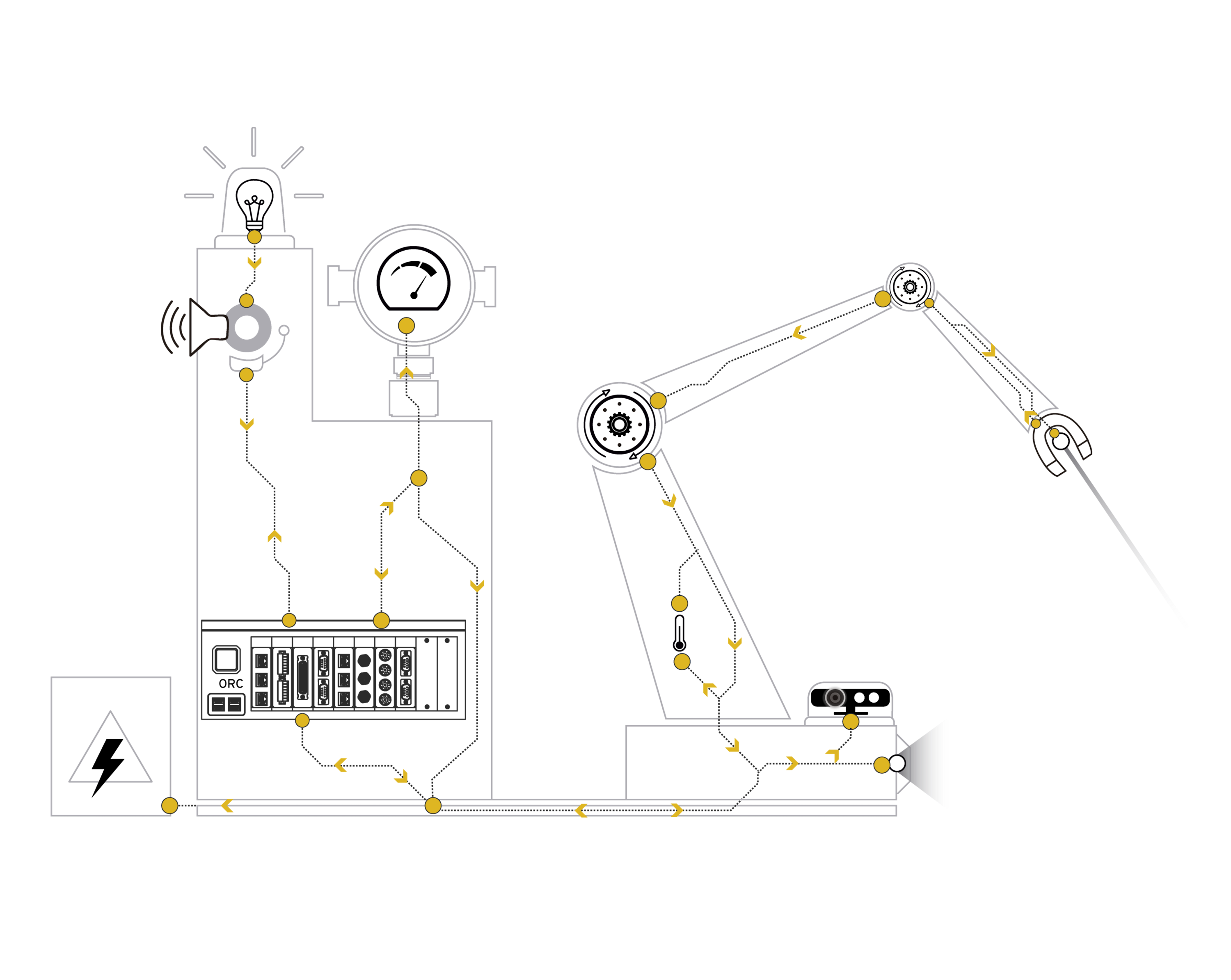
MARA empowers new possibilities and applications in the professional landscape of robotics. Built out of individual modules that natively run ROS 2, the robot can be extended in a seamless manner. MARA delivers industrial-grade features such as time synchronization or deterministic communication latencies.

Powered by ROS 2
A fully distributed software and hardware robotic architecture.
Highly customizable
With daisy chaining, power and communication are exposed at the module level allowing for simplified extensions.
Real time data monitoring
Every SoM is able to monitorize a variety of intrinsic aspects in real-time.
Power readings
Instantaneous voltage, current and power readings from each robot module, individually.
Automatic re-configuration
Embedded accelerometers, magnetometers and gyroscopes empower each robot module with inertial data.
HW and SW life cycle
Life cycle for each robot module allows greater control over the state of the ROS system and the underlying components.
Controllable from any ROS 2 enabled computer
ORC is the ideal complement for MARA, but not mandatory. Choose yourself how you steer MARA.
The H-ROS robot bus is deployed in each of the robot modules trough a tiny hardware device called H-ROS SoM (System on Module). All the modules that compose MARA have an H-ROS SoM inside, running ROS 2 natively, and providing security, interoperability, real-time and extensibility capabilities, among others.
Discover the SoM
MARA can be extended just by adding robot parts. The system is also scalable: from one module to even hundreds of it plugged together. Modularity allows you to customize your robotic arm for that specific application you need.

The H-ROS connector family greatly simplifies the assembly of the modules providing contacts for power and communication purposes. Spring-based, the contacts offer the needed tolerance and flexibility. Thanks to this, an easy mechanical coupling can be made, avoiding cables.

We are working with leading manufacturers to modularize a wide range of end-effectors. Moreover, we have designed a mechanical system that allows to change the end-effector manually, without needing any tool. Due to a simple but efficient design, without gaps, the MARA robotic arm allows to work in a time-saving, precise and meticulous manner.

Gazebo is an essential tool in every roboticist's toolbox. Download realistic simulated models for MARA and try your application out before buying.
Meshes URDF Simulation instructions
